Prepar3D
Fly Elise-ng Immersive Display PRO 和 Immersive Calibration PRO 软件已成为校准和驱动几何准确、边缘融合的多投影机显示器的行业标准。与 Prepar3D 的 (P3D) ViewGroups 功能结合使用时, Immersive Calibration PRO 和 Immersive Display PRO 是设置 P3D 投影和视图的重要工具。
许多用户以各种方式集成该软件,无论是使用具有 P3D 3D 虚拟驾驶舱模式的实际驾驶舱面板还是选择 2D 驾驶舱模式。
在 P3D 中定义多个相机视图
传统上,P3D 的默认相机配置为适合机长/飞行员(左座)的视图。

然而,这种观点与副驾驶/副驾驶(右座)的观点并不相符。为了生成正确的座位视图,P3D 需要不同的内部相机设置。本指南将概述一种在 P3D 中定义多个相机的简单有效的方法,使您可以在左座、右座甚至乘客视图之间切换。幸运的是,相同的校准结果 Immersive Calibration PRO 可用于所有相机。
设置示例
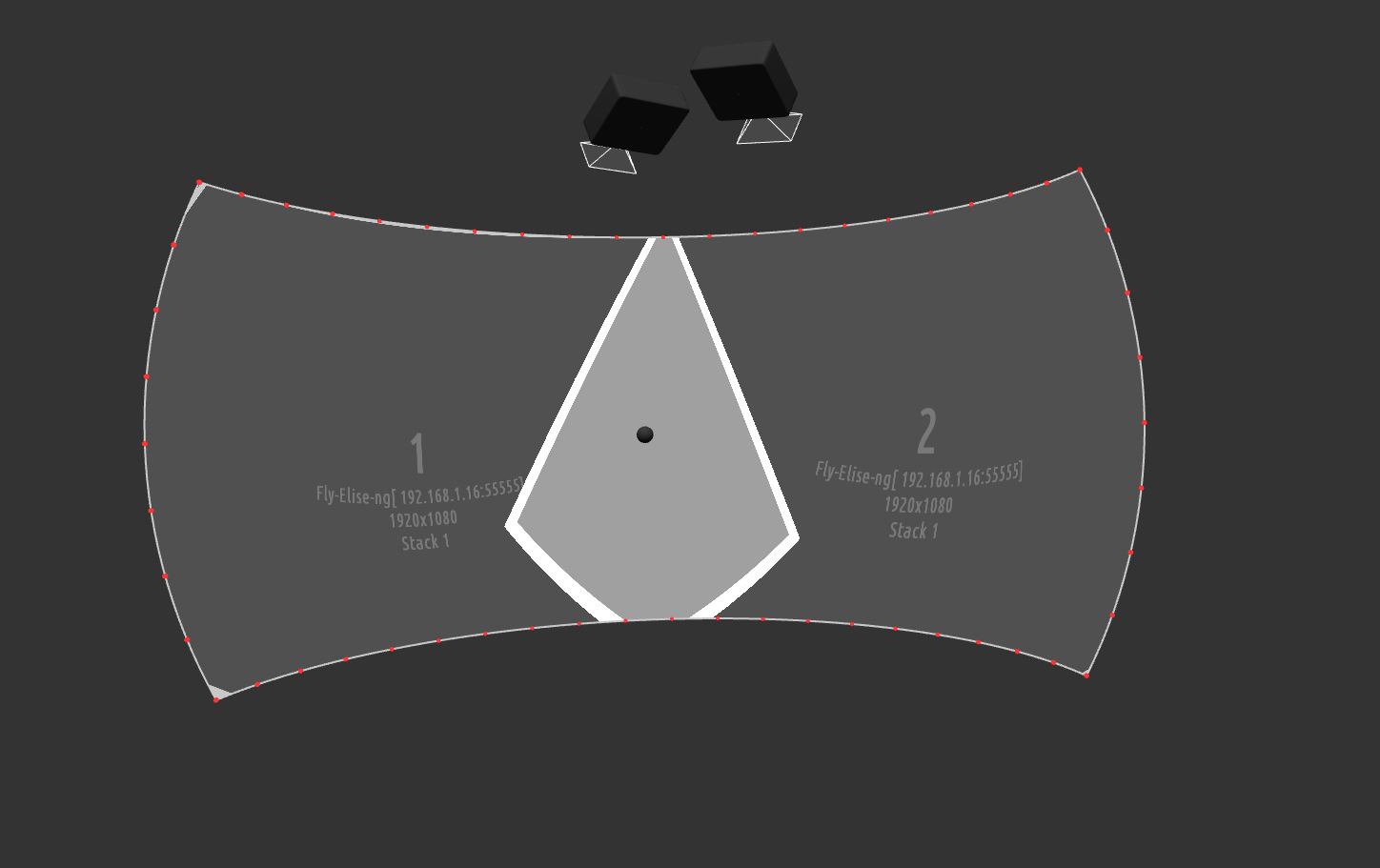
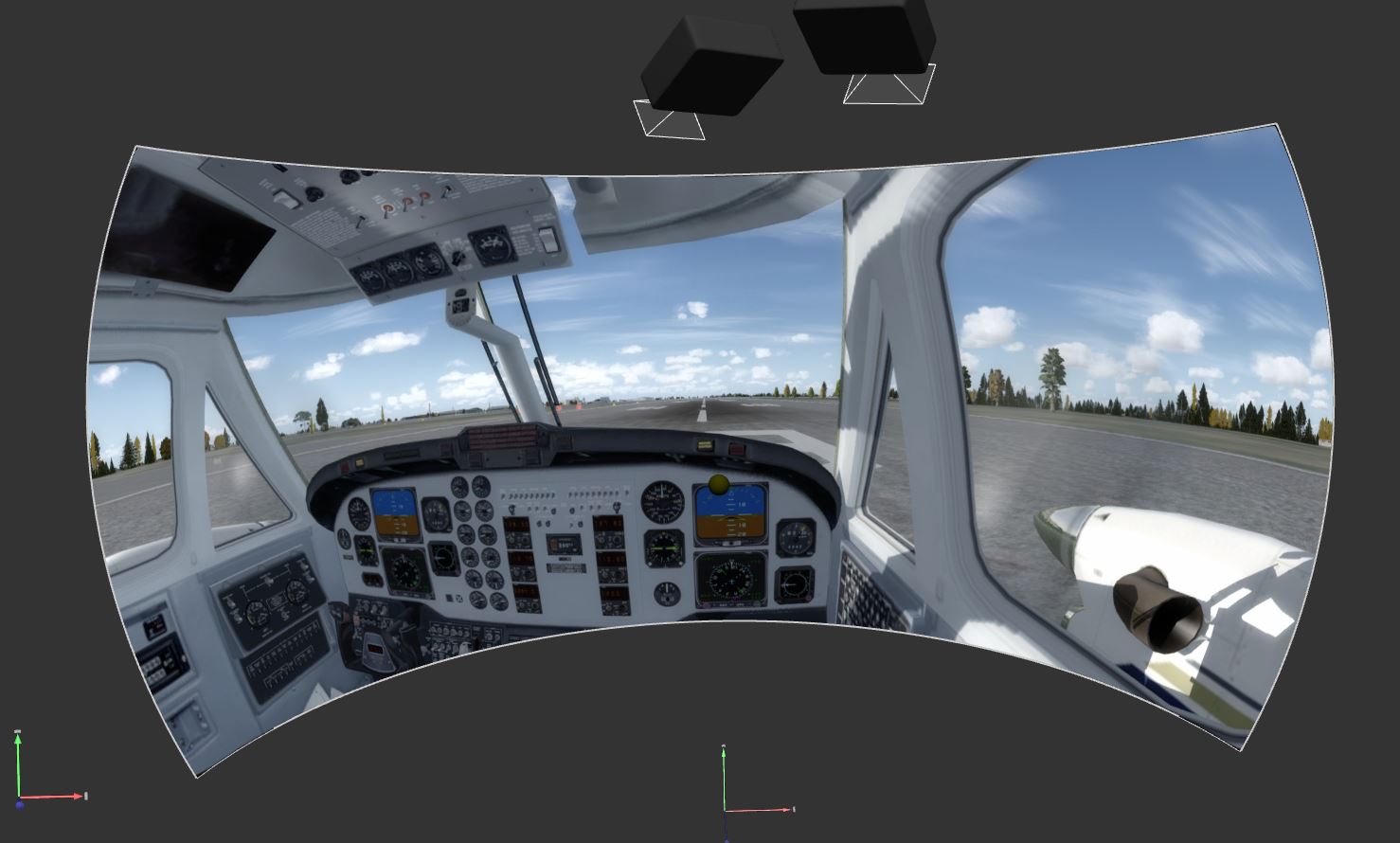
在本次演示中,我们将使用紧凑的投影设置:2 米长的部分圆顶屏幕,水平 FOV 为 160 度,垂直 FOV 为 60 度。两台短焦 1920x1080 高清投影机将覆盖整个屏幕,包括重叠区域。屏幕分为 20 列和 8 行用于校准目的。
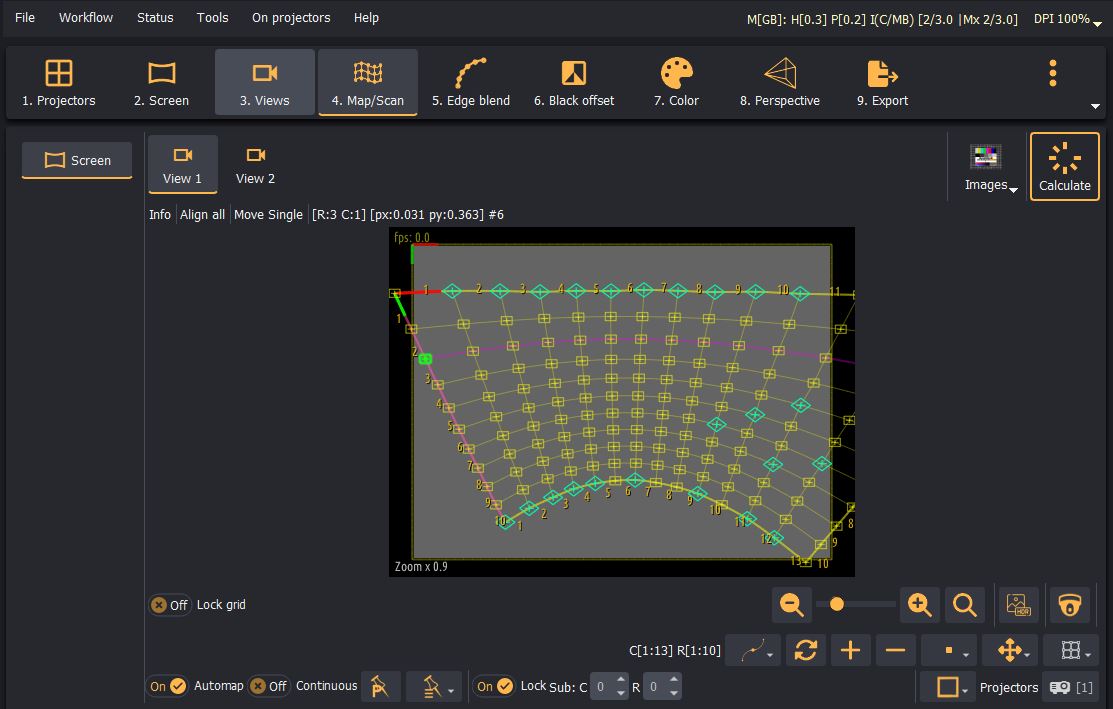
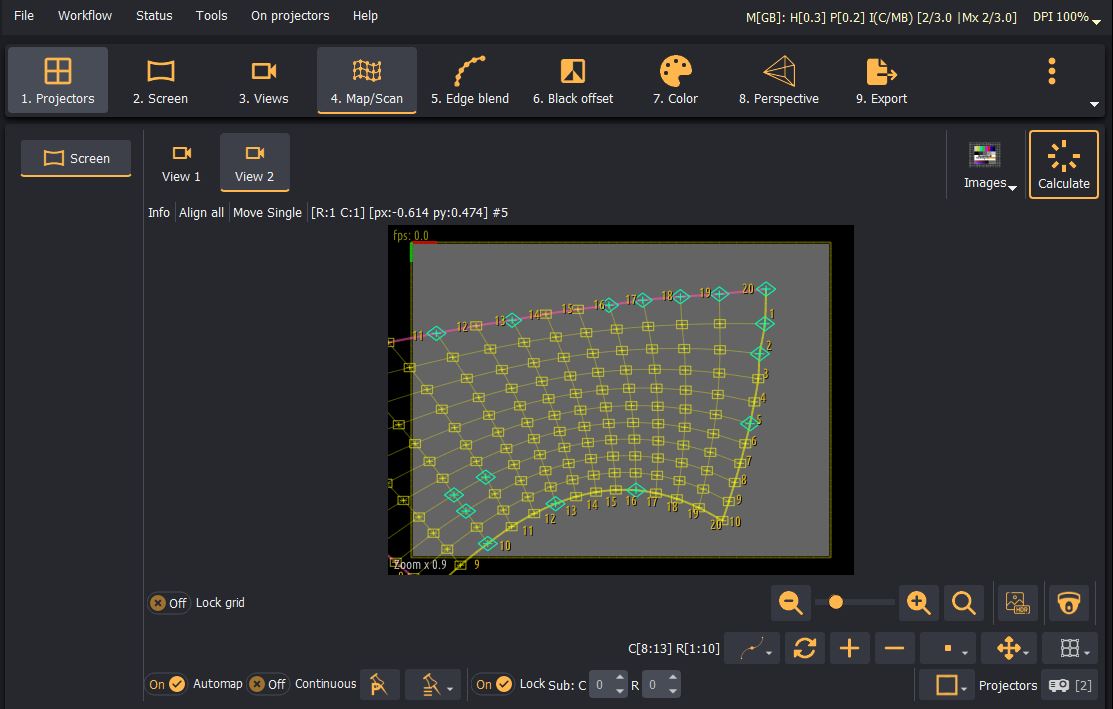
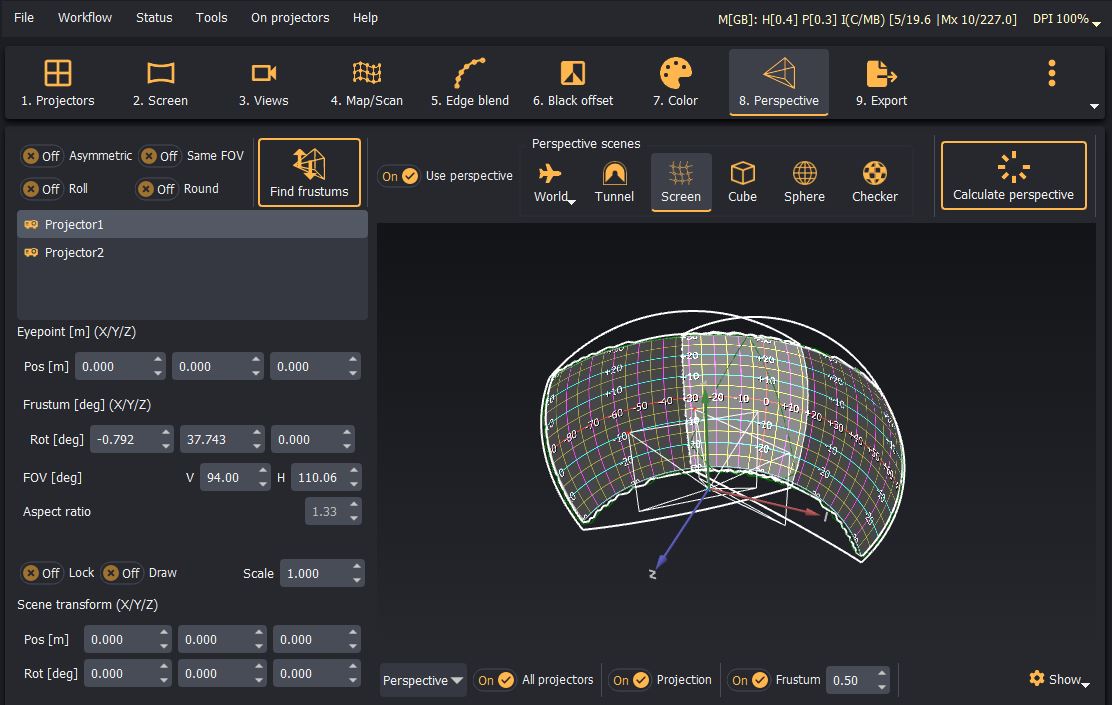
使用标准 沉浸式校准自动对齐,校准投影,并导出校准数据。
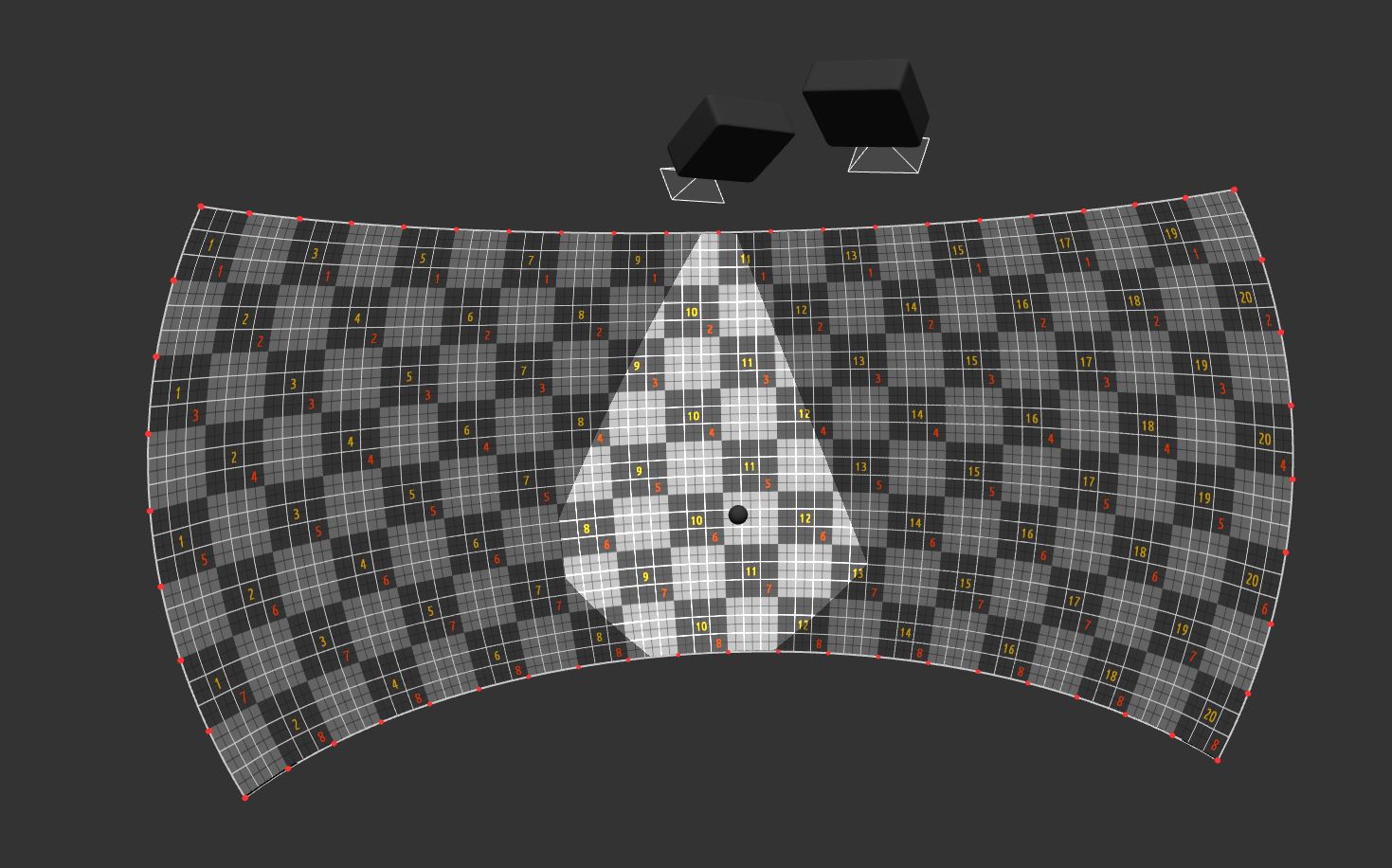

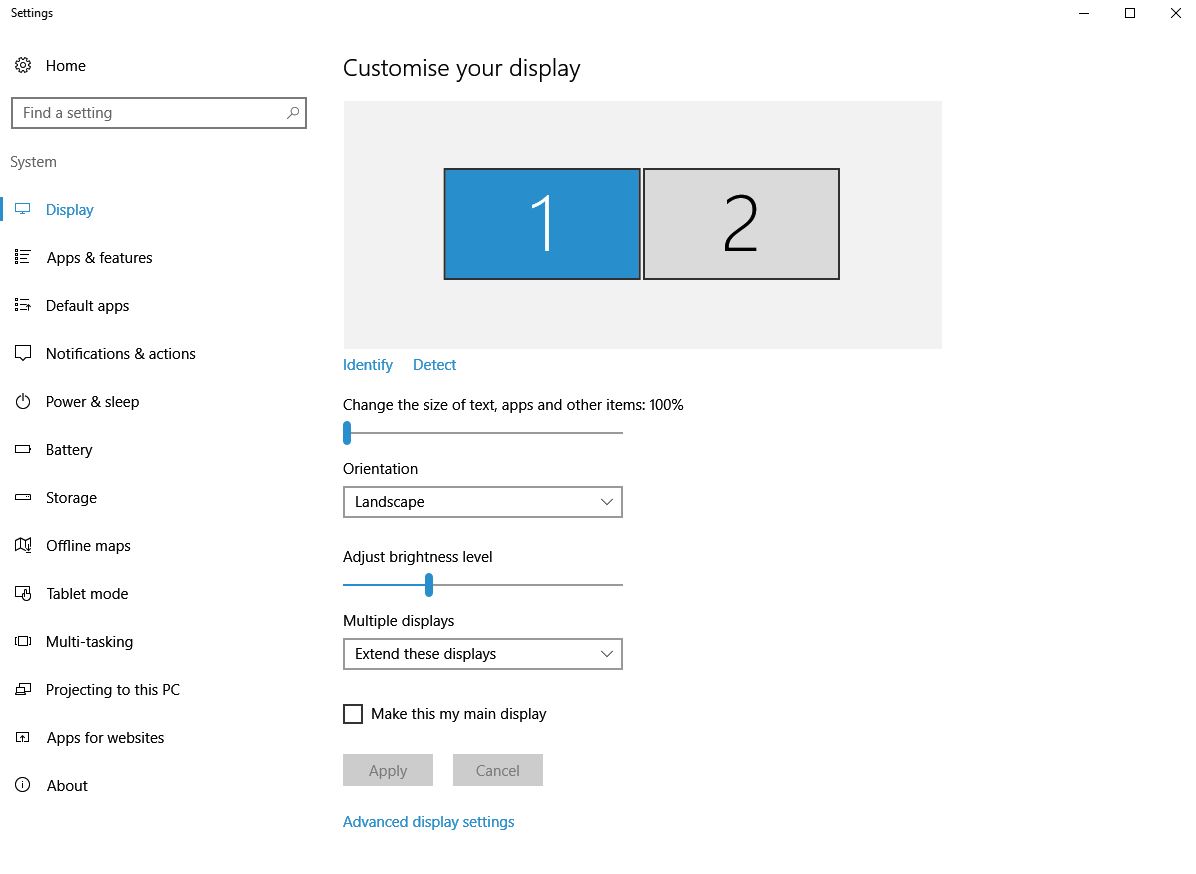
P3D 的 ViewGroups 功能需要扩展显示模式,每个显示器设置为 1920x1080 分辨率。
生成的 multi.procalib 文件被加载到相应的 Immersive Display PRO 显示,以及 ViewGroups.xml 文件被复制到您的 P3D 文件夹中。在本例中,我们将使用默认的 P3D 飞机 Beech King Air 350。
当选择默认的虚拟驾驶舱 3D 视图时,从左侧座位看投影将呈现出正确的几何效果,虚拟驾驶舱和跑道中心线将针对机长/飞行员的视图精确对齐。


创建新相机
要为飞行员和副驾驶创建专用视图,您需要在 cameras.cfg 文件。
-
定位
cameras.cfg:该文件位于%APPDATA%\Lockheed Martin\Prepar3D v[3/4/5/6]文件夹。 在进行任何更改之前,请创建原始文件的副本。 -
识别最后一个相机定义: 转到最后
cameras.cfg文件并记下最后一个相机的定义。例如:
[CameraDefinition.020]
Title = Oculus Virtual Cockpit
Guid = {C69C6771-EB1F-4346-ADD7-0F8910277CE3}
Description = Virtual Cockpit view using the Oculus.
- 复制虚拟驾驶舱相机定义:转到文件开头并复制虚拟座舱相机的完整定义。例如:
[CameraDefinition.002]
Title = Virtual Cockpit
Guid = {C95EAB58-9E4A-4E2A-A34C-D8D9D948F078}
Description = This is the description of the virtual cockpit view.
- 粘贴并重命名新相机:将此复制的定义粘贴到文件末尾两次以创建两个新相机。为每个新相机分配一个比最后一个现有相机更高的唯一编号。在我们的示例中,我们将使用
[CameraDefinition.021]和[CameraDefinition.022]。编辑Title对于每个新相机:
Title = Virtual Cockpit PILOT
Title = Virtual Cockpit COPILOT
- 生成唯一的 GUID:P3D 中的每个相机都需要一个唯一的 GUID。使用 GUID 生成器(例如 https://www.guidgenerator.com/)为您的新相机创建新的 GUID。更新
Guid中的值cameras.cfg文件。例如:
Guid = {D6EEA7C8-8D69-43CA-8357-DFA7DB4ACA24}
Guid = {BFE71794-4C0F-4256-ADE6-138B44C1062D}
- 设置缩放属性:确保
InitialZoom对于新相机设置为1.0和AllowZoom设置为FALSE。
AllowZoom = FALSE
InitialZoom = 1.0
放置相机
现在,我们将为每个相机定义正确的位置,以匹配飞行员和副驾驶的视点。
- 飞行员相机:对于飞行员的相机,在其定义末尾添加以下行:
InitialPbh=0, 0, 0
InitialXyz=0.0, 0, 0
P3D's default eyepoint is at the left seat, so no `Xyz` offset is needed for the pilot's view. Remember to include a space character after each comma.
- 副驾驶相机:对于副驾驶的相机,我们将在 King Air 示例中使用左座椅视点位置左侧 0.7 米的偏移。这会将视点放置在正确的位置:
InitialPbh=0, 0, 0
InitialXyz=0.7, 0, 0
激活和使用新相机
- 保存
cameras.cfg - 启动 P3D
- 启用ViewGroups:确保 Immersive Calibration PRO ViewGroups 被选中。
- 选择相机:右键单击 P3D 窗口,您现在可以在飞行员和副驾驶视图之间进行选择。选择副驾驶视角后,虚拟驾驶舱和跑道将完美对齐,以匹配右座副驾驶的视角。

当然,您可以创建多个相机来匹配任何驾驶舱和任何观察者的视点位置。
内容依据官方英文文档校对:https://doc.elise-ng.net/calibration/simulators/p3d/